Product finder
-
Classification:
-
Environment:
-
Type:
-
Control model:
-
Rated current:
-
Peak current:
-
Supply voltage:
-
Feedback:
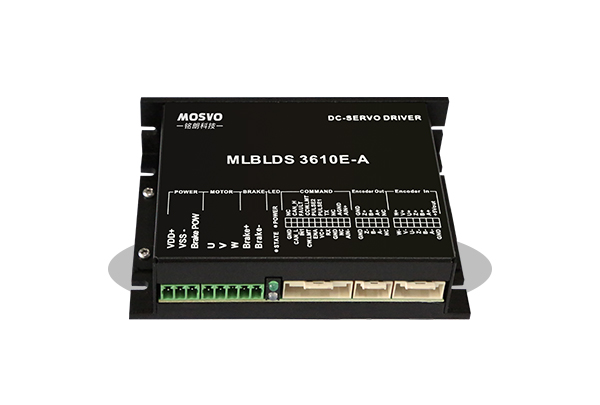
• For BLDC Motor • Command Inputs: RS232, CAN2.0B, Pulses, PWM, Analog
• Feedback: Quad A/B digital, with or without Hall sensor
• Position Mode, Velocity Mode, Torque Mode
• Hardware / Software Position Limit
• Home-seeking
• IIT Current Limit
• Protection: Over Current, Over Voltage, Under Voltage, etc.
• Programmable Digital I/O
• Space Vector Arithmetic, Sine-wave Control (for BLDC Motor)
• Electromagnetic brake control
• Ambient Temperature: -10~70℃, -40~85℃ for Industrial Level.

